








Mit der Übernahme des autonomen Unterwasserfahrzeugs BlueWhale durch die Deutsche Marine erreicht der in Grundsatzdokumenten angekündigte Wandel einen ersten sichtbaren Kulminationspunkt: die Deutsche Marine ist auf dem Weg zu einer Flotte aus vernetzten bemannten und unbemannten Plattformen unter, auf und über Wasser. BlueWhale ist dabei nicht nur ein weiteres unbemanntes System, sondern ein Schlüsselbaustein im Spannungsfeld von „Kurs Marine 2025“, Zielbild Marine 2035+ und den für 2026 formulierten Absichten des Inspekteurs Marine.
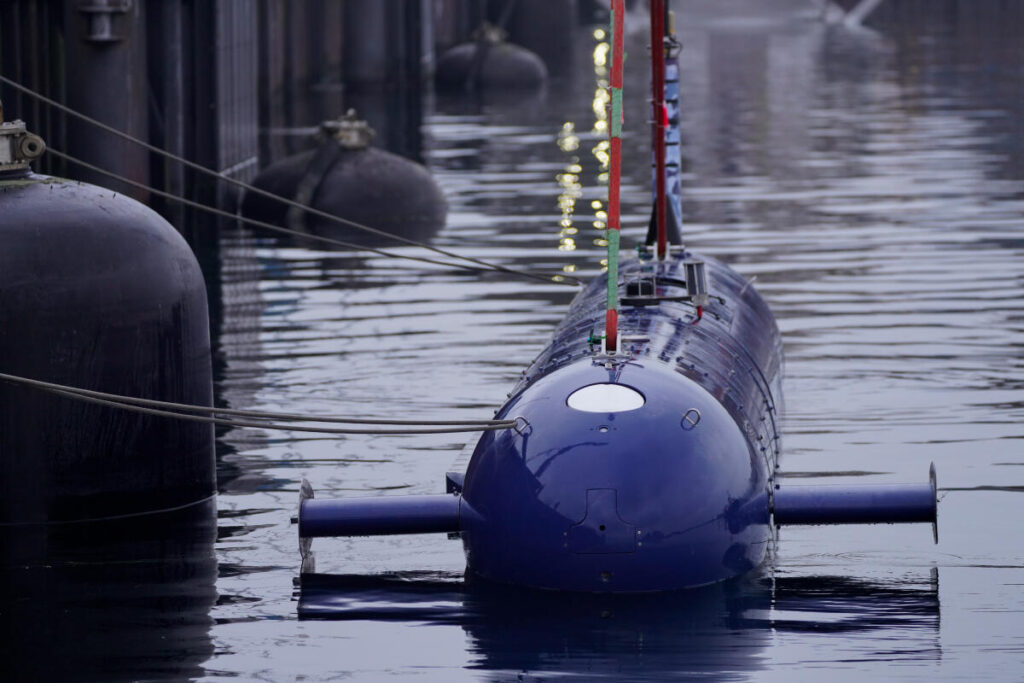
Am 25. Februar 2026 haben TKMS und Israel Aerospace Industries (IAI) im Marinestützpunkt Eckernförde das großformatige autonome Unterwasserfahrzeug BlueWhale offiziell an die Deutsche Marine übergeben. Die Zeremonie, an der unter anderem BMVg‑Staatssekretär Jens Plötner und der Inspekteur der Marine, Vizeadmiral Jan Christian Kaack, teilnahmen, markiert zugleich einen sichtbaren Einstieg Deutschlands in das internationale Segment der Extra Large Unmanned Underwater Vehicles (XLUUV).
Die Übergabe folgt auf erfolgreiche Erprobungen in der Ostsee, die 2024/25 in mehreren Phasen durchgeführt wurden. BlueWhale musste und konnte in einer maritimen Umgebung, die durchaus als akustisch, hydrografisch und nautisch komplex bezeichnet werden kann, seine Fähigkeiten in der U‑Boot‑Ortung, Minenaufklärung und maritimen Aufklärung demonstrieren. Kaack hatte diese Tests bereits im Herbst 2025 als „wichtigen Meilenstein“ im Aufbau unbemannter Unterwasserfähigkeiten und als handfesten Beleg für die Umsetzungsfähigkeit des Kurses Marine bezeichnet. BlueWhale wurde auf der UDT in Rostock im Mai 2023 einer breiteren Öffentlichkeit präsentiert.

Mit „Kurs Marine 2025“ und dem Zielbild Marine 2035+ hat die Marine ihren Anspruch formuliert, sich von einer primär plattformzentrierten Flotte zu einer hybriden Flotte als einem vernetzten System aus bemannten und unbemannten Trägern zu entwickeln. In den Dokumenten wird der Aufbau von Future Combat Surface Systems (FCSS), Large Remote Multi‑purpose Vessels (LRMV) und Large Uncrewed Underwater Vehicles (LUUV) sowie der systematische Einsatz von Drohnen von Bord über und unter Wasser nicht als Option, sondern als Zielvorgabe beschrieben.
Der Leitsatz „Every unit a drone carrier“ macht deutlich, dass unbemannte Systeme als integraler Teil künftiger Einsatzgruppen verstanden werden, nicht als nachgeordnete Nischenfähigkeit. Das Zielbild 2035+ spricht explizit von einer „Vielzahl unbemannter Systeme“, die durch vernetzte Sensorik, KI‑gestützte Auswertung und robuste Führungsfähigkeit das Lagebild ergänzen und Wirkung ermöglichen sollen – insbesondere in Randmeeren, beim Schutz kritischer Unterwasserinfrastruktur und zur Abwehr hybrider Bedrohungen.
Im Kurs Marine stellt der Inspekteur eine Zukunft vor, in der unbemannte Systeme in einer hybriden Marine alltäglich sind. Unbemannte Unterwasserfahrzeuge sollen künftig neben bemannten U-Booten die Unterwasseraufklärung übernehmen. Vizeadmiral Kaack hat diese konzeptionelle Linie in seinen „Absichten 2026“ und öffentlichen Äußerungen nochmals zugespitzt: Unbemannte Systeme sollen dort vorne stehen, wo das Risiko hoch ist, die Distanz gering und der Gegner nah – während bemannte Großplattformen im Nordatlantik, in der U‑Boot‑Jagd und in der kollektiven Abschreckung eingebunden bleiben. Die Marine sei „im Aufbruch“, so Kaack, und erwarte 2026 die „schnelle Übernahme, Integration und Nutzung“ zahlreicher neuer Drohnensysteme – auf, unter und über der Wasseroberfläche.
Vor diesem Hintergrund wird BlueWhale ausdrücklich als Baustein in einer Gesamtentwicklung verstanden, nicht als isoliertes Einzelprojekt.



Die Deutsche Marine startet jedoch nicht bei Null. Seit Jahren werden unbemannte beziehungsweise ferngelenkte Systeme vor allem im Minenkampf eingesetzt: Die Seehund-Räumfahrzeuge der „Seehund“-Klasse werden von den Minenjagdbooten der Frankenthal-Klasse aus ferngesteuert und simulieren mit Magnetspulen und Geräuschbojen die akustischen sowie magnetischen Signaturen vollwertiger Schiffe, um Minen zur Detonation zu bringen; bis zu vier dieser Fahrzeuge können von einem Boot geführt werden und haben sich in Übung und Einsatz als robuste, besatzungsschonende „Multitools“ etabliert. Zudem nutzen Minenjagdboote ferngesteuerte Unterwasserdrohnen (ROV/AUV) zur Identifizierung und Bekämpfung einzelner Minen.
Mit SeaCat werden seit 2025 autonome AUV-Systeme eingeführt, die mit hochauflösendem Sonar und Einsatztiefen bis 300 Meter Minen und andere Objekte auf dem Meeresboden aufklären; sie gelten als zentraler Baustein moderner Minenabwehr und stehen für den Schritt von ferngelenkten hin zu stärker autonomen Unterwasserplattformen in der MCM-Rolle. Für die Korvetten K130 wurden darüber hinaus drei Systeme des Bordhubschrauber-UAV „Sea Falcon“ (Skeldar V-200) mit insgesamt sechs Luftfahrzeugen beschafft, doch nach einem Verlust und technischen Problemen wurde das Programm deutlich abgebremst, ein regulärer operationeller Einsatz findet derzeit kaum statt und Alternativen werden evaluiert. Im Bereich der Überwasser-Drohnen (USV) befindet sich die Marine noch in der Erprobungsphase: Im Rahmen des Future Combat Surface System (FCSS)-OPEX werden zwei unterschiedliche USV-Muster getestet, die mittelfristig als bewaffnungs- und schwarmfähige Systeme eingeführt werden sollen; „Kurs Marine 2025“ benennt für den Minenkampf eine Zielgröße von deutlich über 18 unbemannten Systemen (USV/UUV) sowie langfristig mindestens 18 FCSS-USVs.
Diese Bestandsaufnahme zeigt: Die Marine verfügt über Erfahrung mit unbemannten Systemen, vor allem im Minenkampf. Was bislang weitgehend fehlte, war ein großvolumiges Unterwasserfahrzeug mit langandauernder, autonomer Präsenz und einem Aufgabenprofil, das über den Minenkampf hinaus in den Bereich von U‑Boot‑ähnlicher Aufklärung hineinreicht.

BlueWhale schließt genau diese Lücke. Das etwa 10,9 Meter lange, rund 1,1 Meter durchmessende und circa 5,5 Tonnen verdrängende Fahrzeug wird von IAI als „Large AUV“ beziehungsweise XLUUV vermarktet und zielt auf Einsatzdauern von bis zu rund 30 Tagen bei Marschgeschwindigkeiten um 2–3 Knoten. Die Höchstgeschwindigkeit liegt bei 7 Knoten. Der Rumpf ist hydrodynamisch auf effizientes Langstreckenprofil ausgelegt. Energieversorgung und die Software des Einsatzsystems erlauben wochenlange Operationen ohne menschlichen Eingriff.
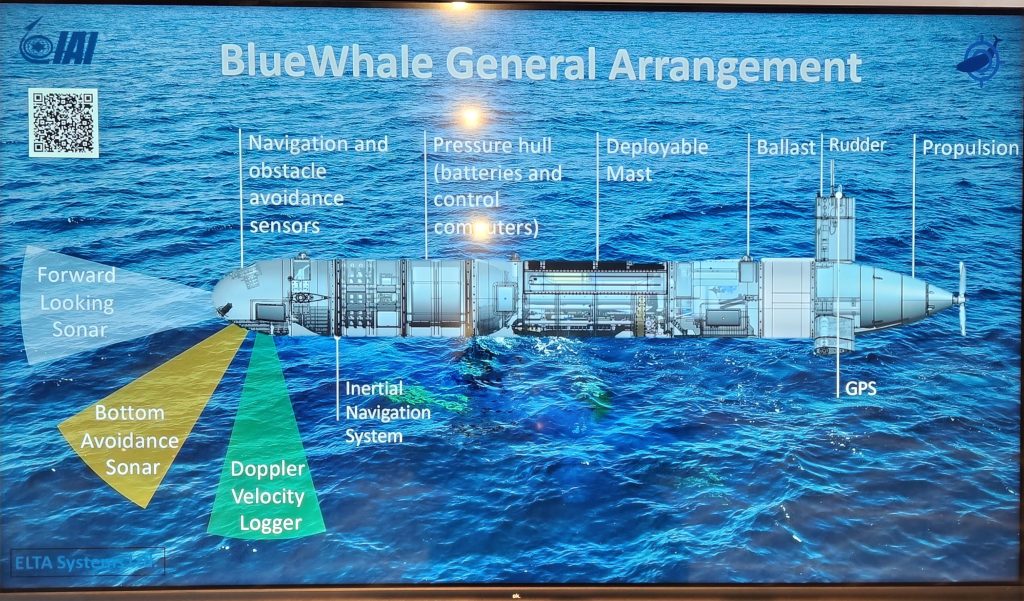
Im Vordergrund steht ein integrierter Sensor- und Datenfusionsansatz: Flanken- und Bugsonare ermöglichen die volumetrische Aufklärung sowie die Untersuchung des Seebodens, ergänzt durch ein von TKMS/ATLAS ELEKTRONIK integriertes fortgeschrittenes Schleppsonar zur U-Boot-Ortung, das bistatische und multistatische Verfahren unterstützt. Optional können Magnet- und weitere Unterwassersensoren zur Minen- und Objekterkennung eingebunden werden. Hinzu kommt ein ausfahrbarer Mast mit Radar, EO/IR-Sensorik und Kommunikationssystemen einschließlich SATCOM.
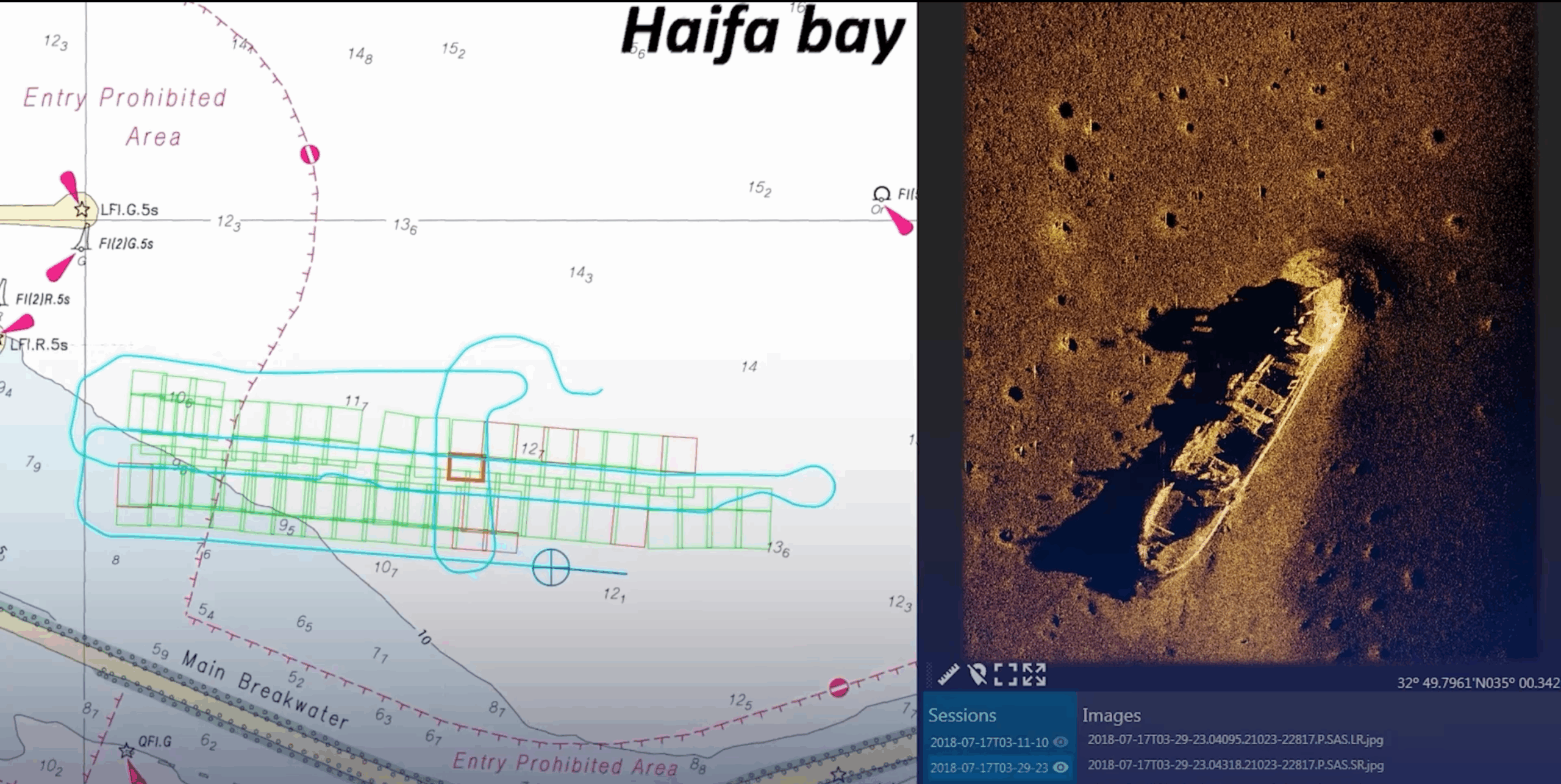


Auf dieser Basis kann BlueWhale sowohl Ziele über als auch unter der Wasseroberfläche detektieren, akustische Signaturen sammeln, Seeminen lokalisieren und gleichzeitig die Rolle eines verdeckten, persistenten Aufklärers übernehmen. Der Mast erlaubt die Nutzung kurzer Kommunikationsfenster, auch beim Tauchen. So können einigermaßen verdeckt Daten in Echtzeit an Führungsstellen an Land oder auf See gesendet und Updates empfangen werden.
Konzeptionell ordnen die Deutsche Marine und die Industrie BlueWhale primär mehreren Rollen zu: der unbemannten U-Boot-Abwehr (ASW) und U-Boot-Bekämpfung in Randmeeren, der Minenaufklärung sowie der Unterstützung der MCM-Kräfte, der maritimen Aufklärung und Signalaufklärung (ISR/SIGINT) in Küsten- und Flachwasserzonen, dem Schutz kritischer Unterwasserinfrastruktur wie Pipelines, Kommunikationskabeln und Offshore-Energieanlagen sowie der Unterstützung von Spezialkräften durch verdeckte Aufklärung im Vorfeld.
Damit ergänzt BlueWhale die existierenden „Seehunde“ und SeaCat‑AUVs, indem es von der taktischen Minen- und Objektsuche in den Bereich operativer bis hin zu strategischer Unterwasseraufklärung hineinreicht. Während die Seehunde ferngesteuerte „Arbeitspferde“ des Minenkampfes bleiben, fungiert BlueWhale als autonomer, vernetzter Sensorträger mit U‑Boot‑ähnlichem Einsatzprofil – allerdings ohne Besatzung und mit deutlich geringeren Personal- und Betriebskosten.

Im internationalen Vergleich positioniert sich Deutschland mit BlueWhale im Mittelfeld: Die US Navy verfolgt mit dem Orca XLUUV ein deutlich größeres, rund 45 Tonnen schweres System mit strategischer Reichweite und hoher Nutzlastkapazität (7-8 Tonnen), das als Unterwasser‑„Mutterschiff“ für Minen, Sensorfelder und Effektoren dienen soll. Naval Group entwickelt UCUV (Unmanned Combat Vehicle) auf Basis eines XL‑UUV‑Demonstrators über 10 Meter langes, bewaffnungsfähiges XLUUV für Unterwassergefecht und Schutz von Infrastruktur. Großbritannien und Japan arbeiten an eigenen XL‑ und Long‑Endurance‑UUV‑Konzepten, die ähnlich wie BlueWhale für den Randmeereinsatz geeignet sein und kritische maritime Passagen sichern sollen.
BlueWhale ist dabei bewusst eher als „leichter“ Vertreter seiner Klasse ausgelegt: groß genug für durchhaltefähige Operationen, klein genug für ein im Vergleich zu Orca, UCUV & Co. überschaubares Risiko- und Kostenprofil. Für die Deutsche Marine, die gleichzeitig Infrastruktur und Ausbildung modernisieren muss, ist dies ein pragmatischer Einstieg – mit der Option, Erfahrungen aus Betrieb und Verbundführung später in weiterführende Drohnen-Generationen einfließen zu lassen.

Die Einführung des BlueWhale ist vor diesem Hintergrund mehr als die Übernahme eines weiteren Spezialgeräts. Sie steht für den Versuch der Marine, den in „Kurs Marine 2025“ und im Zielbild 2035+ skizzierten Paradigmenwechsel tatsächlich einzulösen: weg von einer reinen Plattformlogik, hin zu einem System aus bemannten Leitinstrumenten und einer Vielzahl spezialisierter unbemannter Träger unter, auf und über Wasser.
Gemeinsam mit bewährten Systemen wie Seehund, den neuen SeaCat‑AUVs, in Erprobung befindlichen USV und perspektivisch neuen Bord‑UAV entsteht schrittweise der „Drohnenverbund“, den Kaack für 2026 und darüber hinaus eingefordert hat. BlueWhale nimmt darin eine Schlüsselfunktion ein – als erstes großvolumiges, autonomes Unterwasserfahrzeug der Marine, das U‑Boot‑ähnliche Aufklärung und Sensorik liefert, ohne Besatzung zu gefährden und ohne die ohnehin knappen bemannten Plattformen weiter zu strapazieren.
Dass Deutschland diesen Schritt in enger Kooperation mit Israel und der heimischen Industrie geht, ist zugleich industrie‑ und sicherheitspolitisches Signal: Die Marine will im entstehenden XLUUV‑Segment nicht nur Nutzer, sondern Mitgestalter sein – und das möglichst früh im kurvenreichen Aufstieg dieser neuen Fähigkeit.
| Merkmal | BlueWhale (IAI) | Orca XLUUV (Boeing/US Navy) |
| Länge | ca. 10,9 m defense-update+1 | Basisrumpf ca. 15,5 m, mit Payload‑Modul ca. 25,9 m [navalnews] / Gesamtangaben ca. 51–85 ft je Konfiguration boeing+1 |
| Durchmesser/Breite | ca. 1,12 m defense-update+1 | ca. 8,5 ft (≈ 2,6 m) [Boeing] |
| Verdrängung/Gewicht | ca. 5,5 t defense-update+1 | rund 45 t Klasse, Nutzlast bis ca. 7–8 t (trocken) defence.h5mag+2 |
| Endurance | typ. 2–4 Wochen, bis ca. 30 Tage defense-update+1 | „Monatslange“ Einsätze, Reichweite ca. 6.500 sm auf einem Energiemodul boeing+2 |
| Geschwindigkeit | 2–3 kn Marsch, max. 7 kn | für Langstrecken optimiert, genaue Fahrprofile nicht publiziert, Fokus auf Reichweite statt Geschwindigkeit |
| Tauchtiefe (Zielbereich) | bis ca. 300 m | Angaben variieren, ausgelegt für „deep ocean“ und Seebodenoperationen |
| Sensorik | Schleppsonar (ATLAS/ACTAS‑Ableitung), Flankensonar, Radar, EO/IR, magnetische Sensoren, SIGINT‑Option, SATCOM‑Mast | Sensorsuite missionsabhängig; Navigation mit INS, Doppler‑Log, Tiefensensoren, ISR‑Sensorik und ggf. Minen‑/Waffensysteme in modularen Nutzlasten |
| Nutzlastraum/-masse | primär integrierte Sensorik, begrenzter interner Raum | modulare Payload‑Sektion ~10 m, bis zu 8 t Nutzlast; Platz für UUV‑Swarm, Minen, Sensorketten usw. |
| Hauptrollen | ASW (bistatisch), MCM, ISR, Küsten‑/Litoralraum, Forward Scout, Unterstützung Spezialkräfte | ISR, Seebodenkrieg, Minenlegung (z.B. Hammerhead), persistente Präsenz, ggf. Waffenplattform in großem Operationsradius |
| Start/Recovery | von Marinebasis/Hafen oder Plattform, Details kundenabhängig | pier‑seitiger Start/Rückholung ohne Trägerschiff (host‑ship independent) |
Hans Uwe Mergener
 Produktionsstart der U-Boote der City-Klasse – Nächster Schritt auf dem Weg zum deutsch-norwegischen U-Boot U212CD
Produktionsstart der U-Boote der City-Klasse – Nächster Schritt auf dem Weg zum deutsch-norwegischen U-Boot U212CD
 Niederlande: Verteidigungsministerium erwartet Angebote für neue U-Boote bis Ende Juli
Niederlande: Verteidigungsministerium erwartet Angebote für neue U-Boote bis Ende Juli
 Oliver Burkhard übernimmt CEO-Posten von thyssenkrupp Marine Systems
Oliver Burkhard übernimmt CEO-Posten von thyssenkrupp Marine Systems
 Verschiebung des Indian Ocean Naval Symposiums – keine Indik-Reise für die Fregatte „Hamburg“
Verschiebung des Indian Ocean Naval Symposiums – keine Indik-Reise für die Fregatte „Hamburg“
 tkMS ist einer der beiden Finalisten für das polnische Miecznik-Programm
tkMS ist einer der beiden Finalisten für das polnische Miecznik-Programm
 Taufe der ersten SA‘AR-6-Korvette der israelischen Marine
Taufe der ersten SA‘AR-6-Korvette der israelischen Marine
 Marine nimmt Flugbetrieb mit NH90 Sea Lion auf
Marine nimmt Flugbetrieb mit NH90 Sea Lion auf
 thyssenkrupp hält an Schiffbau fest
thyssenkrupp hält an Schiffbau fest
 Thales-Richtfest in Kiel nach fünf Monaten
Thales-Richtfest in Kiel nach fünf Monaten